Research
Current Projects
Discrete Event Control and Mission Planning
The tasking of a fleet of autonomous vehicles involves controlling inherently discrete actions. For example, it may be desired to achieve a set of logical tasks in a specific order. Possible tasks might include, "drop supplies at point A," "avoid obstacles," and "reach point B." The development of this type of discrete control has traditionally been achieved informally based on designer intuition and understanding. This approach has been sufficient in the past, but as complexity increases and time scales decrease, it has become apparent that formal design procedures are necessary. In the case of tasking autonomous vehicles, the problem quickly becomes complex as larger and larger numbers of vehicles are considered. Furthermore, the control strategy may need to be quickly and automatically reconfigured if environmental conditions or the mission objectives change.
In recent years, techniques have been developed to formally describe and implement the discrete control logic needed by these classes of problems. Application of such techniques has so far been limited due primarily to the recentness of the research, but also due to problems associated with developing models as well as with computational complexity of controller verification and design. This research seeks to apply new research results to the established problem of tasking autonomous vehicles and to gain insight into how to best address these types of implementation issues. This work is supported in part by the University of Detroit Mercy Professor's Union research fund.
Here is a
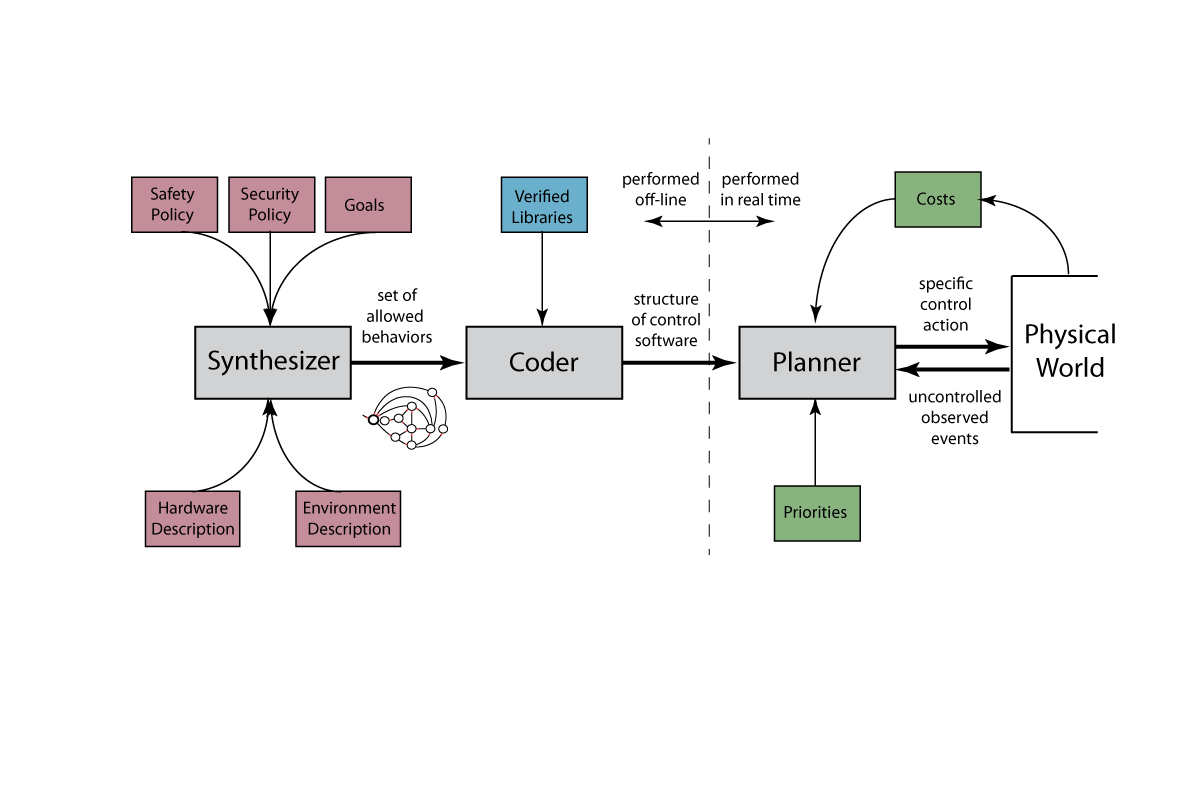
Other work on the formal verification and synthesis of discrete control logic is also being performed for manufacturing systems and for an automotive passice entry system (supported by TRW).
Omni-directional Vehicle Design and Control
The high-mobility robotic vehicle shown below has been built under a grant from the U.S. Army Tank Automotive Research, Development and Engineering Center (TARDEC). The vehicle is effectively omni-directional and draws on an active split offset castor (ASOC) design where each of three "pods" have two castored wheels. The two wheels of each pod have independent suspensions that help to maintain ground contact even over moderately rough terrain.
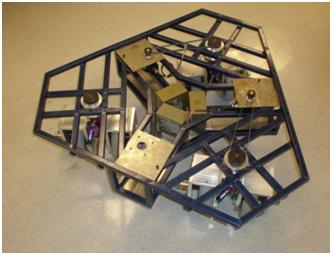
Work has also been performed to develop a high-fidelity simulation of the vehicle. This simulation is being employed to safely and quickly develop control algorithms and to investigate other geometric configurations of the vehicle.
Here is a
Advanced Vehicle Diagnostics
In collaboration with Ford Motor Company, a diagnostic design process is being developed for new and advanced vehicles where the current mainstream design process has proven to have limitations. The techniques being developed are guided by a thorough review of the application of current practices in the design of the on-board vehicle fault diagnostic systems of the first generation Ford Escape Hybrid Electric Vehicle (HEV) program and a demonstration Fuel Cell Electric Vehicle (FCEV) program.
